

目的
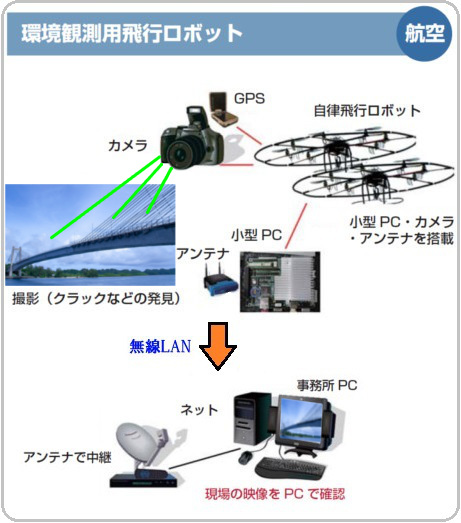 4研究分野の1つである航空分野では、環境観測用の遠隔操作飛行ロボットの開発とそのネットワークシステムの構築を目標としています。
4研究分野の1つである航空分野では、環境観測用の遠隔操作飛行ロボットの開発とそのネットワークシステムの構築を目標としています。
日本は自然災害の多い国として知られます。地震、台風、洪水など災害が発生した折、
上空からいち早く災害状況を把握したり、災害前に防災マップを作成し、被害を最小限に留めることが重要になります。
また、橋や建物などの社会インフラの劣化状況を飛行ロボットを活用してモニタリングすることも必要となっています。
このように、無人ヘリコプタは文字どおり人がいないという特性を活かし、人が立ち入ることが困難な場所や極限環境の現場での作業を行うことができます。
以上のことから、無人飛行ロボットの開発に励んでいます。

研究内容

私たちの研究室では円盤型(Disk Type)の飛行ロボットを製作しています。
円盤型では約200mの高度まで上昇しカメラで撮影し、そのデータをリアルタイムで受信することが可能です。
私たちが目指す今後の目標としては、災害発生時、このロボットによるデータをもとにハザードマップを作成し、スマートフォンやタブレットPCに情報を伝達しリアルタイムで更新することができるシステムの構築です。 まだまだ、実現には時間がかかると思いますが、研究室のメンバーで協力し合いながら、頑張っていきます!!(≧∇≦)/★
斜張橋ケーブル点検ロボットの開発
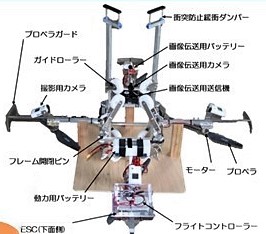
構造物の点検のためのロボットが世界のあらゆる場所で必要となっています。 特に日本では橋梁等の社会インフラの高齢化が問題になっており、 メンテナンスの義務化が法規により定められています。 従来の人手による点検は危険で効率が悪く、それに代わるロボットシステムの開発が 望まれています。 本研究は、社会インフラ点検用ロボットの開発を目指したもので、 社会ニーズの高い斜張橋ケーブル点検ロボットの開発を企業と協力して行いました。 ケーブルはめ込み型のマルチロータ飛行ロボットという世界初のメカニズムを 発明し、さらにロボットの内側にカメラを内蔵することによるケーブルの損傷具合の 撮影と地上への画像転送により、強風時でも斜張橋ケーブルを安全・確実・迅速・低コストで 点検することが可能となりました。これにより点検作業の効率が大幅に向上し、 全国の斜張橋点検が速やかに行えるようになります。