

海洋では小型ロボットによる海底調査のため、主に
魚型ロボットを中心とした研究・開発を行なっています。
弾性振動翼という鰭の動きを用いることでよりリアルな
魚の動きを実現することができ、これまでに、鯛、シーラカンス、
シノノメサカタザメなどの魚型ロボットの開発を行ってきました。
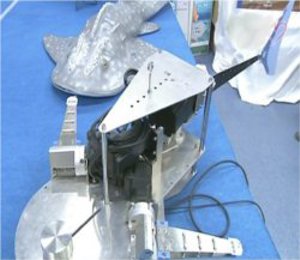
右の写真はシノノメサカタザメの外見と内部構造となります。 胸鰭と尾鰭に弾性振動翼を用いることで海底を這うような複雑な動きも可能としました。
また弾性振動翼のメカニズムは魚ロボットだけでなく 宇宙や医療の分野でも使われており、さらなる発展が期待されています。

本研究室では、ROV(遠隔操作無人探査機)の開発も行なっています。これは、海中や海底などの探査で活躍します。
2023年度に取り組んだ[REMONA SYSTEM]の研究開発における動画を是非ご覧ください。